作者:Yuchuang Tong , Haotian Liu , and Zhengtao Zhang
翻譯:太陽
編者按:
工信部此前發布的《人形機器人創新發展指導意見》,旨在推動人形機器人的研發創新和產業化應用,特別強調了人形機器人集成先進技術(人工智能、高端制造、新材料)的潛在顛覆性,將其視為未來產業的新賽道。對人形機器人的系統性論述,有助于我們更系統的了解該領域的發展歷程和研究現狀,通過對關鍵技術和面臨挑戰的全面分析,能夠更清晰的認識未來的發展方向,把握人形機器人未來發展過程中的機會。
摘要:
文章全面論述了人形機器人的現狀、進展和未來前景,強調其在推動下一代產業發展中的重要意義。通過綜合多學科研究成果,全面分析各方面工作和關鍵技術,包括機器人本體結構、控制、決策、感知和交互,對人形機器人的研究現狀做了詳盡概述。同時,文章指出了該領域當前面臨的全新挑戰,特別強調了深入了解生物運動機制、改進結構設計、加強材料應用、提升先進的驅動和控制方法以及有效利用能源的必要性。技術創新使得人形機器人有望成為下一代產業的引領力量,重點強調仿生學、類腦啟發智能、機械和控制的整合,認為這是開發先進人形機器人系統極具潛力的發展方向。
1.概念和特征
人形機器人通過精良設計,能夠高效模仿人類外觀和行為,熟練地復現人類感知、決策和交互等能力。該領域發展的主要目標是創造出能夠在非結構化和動態環境中持續學習和適應的機器人產品,最終使人類受益并推動人類社會的進步。
與其他形式的機器人相比,人形機器人具有獨特的優勢。其類人設計,包括軀干、手臂和腿部等,增強了對以人類為中心的環境適應性,提高社會接受度,并能夠進行復雜的交互。這種擬人化設計便于與人類進行自然交互,使其在醫療保健和教育等領域發揮重要價值。雙足移動能力使人形機器人能夠在人類空間中高效移動,而其先進的操作能力和靈巧性使其能夠完成復雜的任務。人形機器人的認知能力提高了自主性和適應性。此外,其人機安全特性、社會接受度以及對人類環境的適應性,使其適合承擔協作角色。不過在這些潛在優勢下,人形機器人目前在平衡和能源效率等方面仍然存在諸多挑戰,因此未來的持續研究對于充分發揮人形機器人在各個領域的應用潛力至關重要。
2.發展進程
人形機器人的探索始于20世紀70年代,并在21世紀初迎來顯著的發展。從最初模仿人類外觀和基本動作,逐步演變為擁有類人智能系統,這一進化過程可劃分為三個階段,如圖1所示。首階段始于20世紀60年代末,以早稻田大學等機構在雙足行走機器人領域的先驅研究為代表。第二階段以本田的人形機器人為標志,引入高度集成系統和感知控制技術,使機器人具備了基本感知和簡單判斷的能力。第三階段由波士頓動力和特斯拉領導,實現了高度動態的運動和認知能力的顯著提升,能夠獨立執行復雜任務。
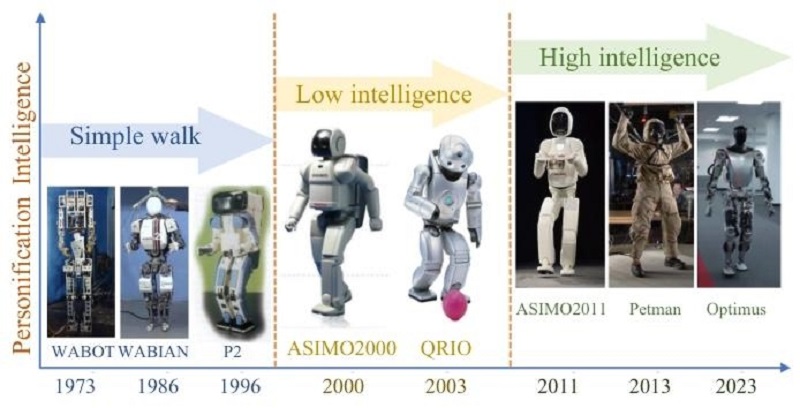
圖1 人形機器人的歷史進展
特斯拉等知名企業進入人形機器人領域,凸顯了成熟創新企業涉足新技術領域的重要性。這些公司帶來了資金、人才和社會的關注,這對于機器人等資本密集型領域至關重要。總的來講,學術界通過奠定理論基礎、開展早期研究,對培育創新理念做出貢獻,而工業界則推動實際應用和規模化發展。
3.主要研發方向
人形機器人的發展呈現兩大主要方向:一種是旨在外部仿真,即復制人類外觀和功能。通過吸收對人類行為的理解,使機器人能夠以類似于人類的方式執行任務,該方向在控制器設計方面仍存在一些挑戰。另一種專注于內部模擬,創造具有人類內部結構的智能機器人,目標是建立與人類伙伴的共情和深度合作。到目前為止,全球范圍內的研究團隊在機器人的類人機制、腦啟發算法、神經形態芯片和肌肉骨骼系統方面已取得了顯著進展。
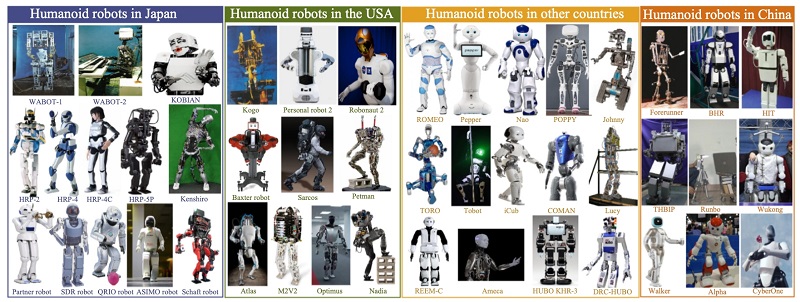
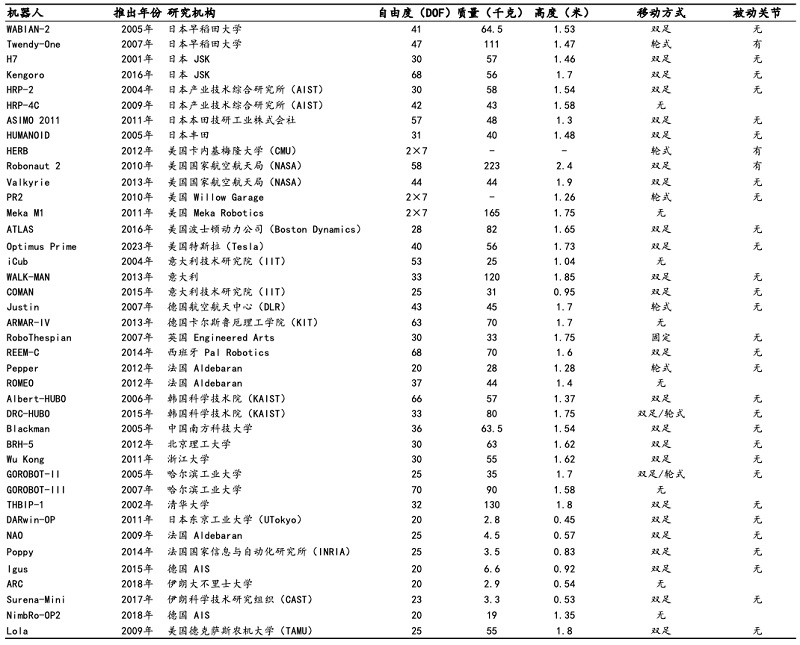
在日本,人形機器人的研究重點主要集中在形態模擬領域,特別強調了開發逼真的仿生機器人,以在服務型場景中應用。相較之下,在美國,人形機器人的研究注重于理解人腦的機制和功能模擬,在復雜環境中操作機器人方面取得了顯著進展,為潛在的實際應用奠定了堅實的基礎。許多其他國家的人形機器人研究受到美國和日本獨特研究的啟發和影響,推動了更多的創新研究和發展。圖2展示了各國獨特的人形機器人設計,每個機器人都具備獨特的屬性和能力。表1則進一步對一些代表性產品的性能參數情況做了展示。
圖2 各個國家人形機器人的研究現狀
表1 典型的人形機器人性能參數情況
4.本體機構與模塊
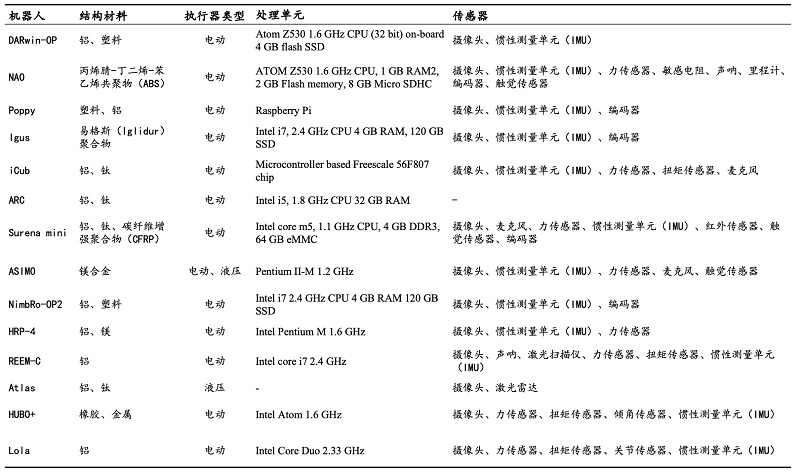
人形機器人的機械設計至關重要,其靈感源于人體復雜結構和微妙動作的巧妙組合。這種設計不僅在促進實際交互方面發揮關鍵作用,還為研究雙足行走及相關領域提供了重要的研究平臺。表1和表2通過對各種人形機器人參數的綜合比較,包括自由度、重量、尺寸、電源和傳感器等,能夠展現不同機器人的能力和局限。
5.控制、驅動與決策
相較于人類的敏捷性和自主性,人形機器人尚存在明顯差距。在控制、驅動和學習方法等方面的進步能夠助推機器人實現所需的能力。設計精良的人形機器人致力于復制人體復雜結構,執行器模擬人體肌肉和關節,以實現逼真的動作。目前不同類型的執行器各具優缺點,影響著機器人的性能、效率和設計復雜性。人形機器人還通過從周圍環境中學習,模仿人類思維和行為,自主決策執行各種任務,并在不同環境下,面對可預測和不可預測的情況進行適應。表3詳細總結了當前人形機器人各種控制和學習方法的分類和各自特點。
6.關鍵技術與挑戰
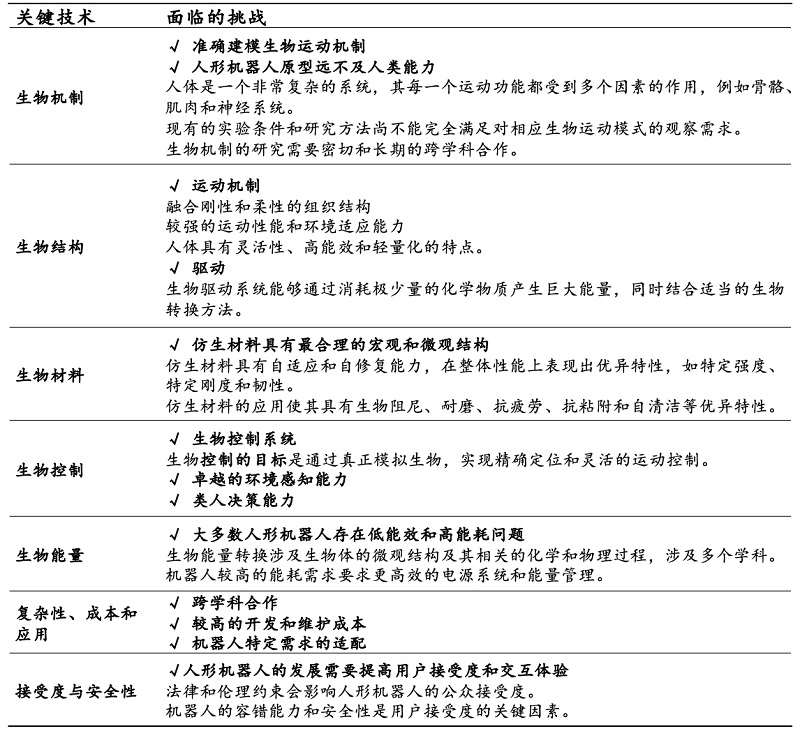
當前,人形機器人在發展過程中仍存在諸多不足,表4全面概述了人形機器人未來發展的關鍵技術和挑戰,未來在生物學、材料科學、控制系統和能量轉換等領域的跨學科合作具有十分重要的意義。
表4 人形機器人關鍵技術與挑戰
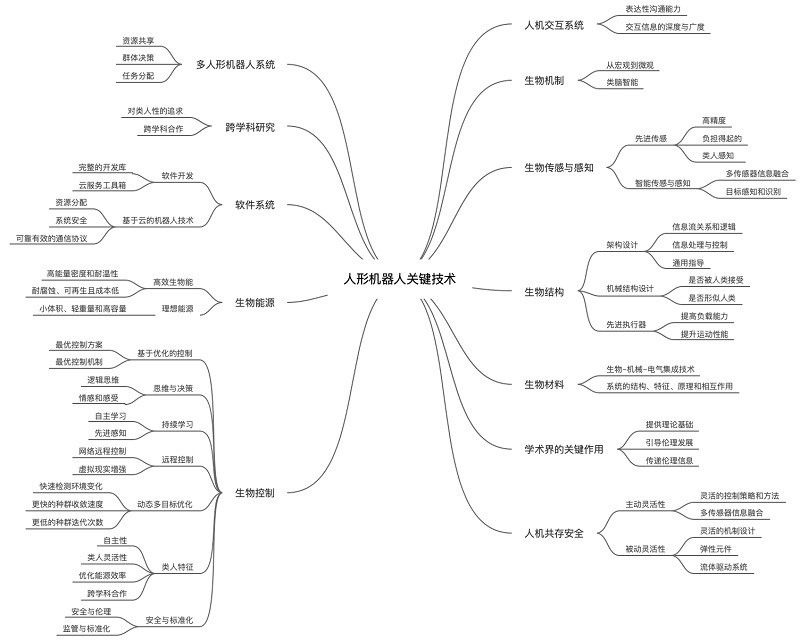
圖3簡明扼要地總結了人形機器人的關鍵技術。綜合而言,人形機器人技術的未來在于跨學科合作和對生物學理解的不斷突破。通過整合結構和生物材料,人形機器人將展現出更強大的功能,拓寬應用領域,并對人類生活的多個方面產生深遠影響。隨著研究和技術的不斷進步,人形機器人成為社會不可或缺的一部分。
圖3 人形機器人關鍵技術
7.未來潛在應用
人形機器人在人類生活的各個領域,包括軍事、工業、救援任務、醫療保健、教育、輔助、娛樂和農業等,都具有廣泛的應用潛力(圖4),勢必將推動下一代產業的發展。展望未來,人形機器人有望在日常生活應用中占據重要地位,成為最重要的智能機器人形式之一。
圖4 人形機器人的潛在應用
原文鏈接:https://www.ieee-jas.net/en/article/doi/10.1109/JAS.2023.124140